
Según las estadísticas del Instituto de la Industria de la Conducción No Tripulada de nueva estrategia, en 2021 se divulgaron más de 200 eventos financieros importantes en la industria de la conducción autónoma en el país y en el extranjero, con un monto total de financiación de casi 150 mil millones de yuanes (incluida la OPI). En el interior, proveedores de soluciones y productos no tripulados de baja velocidad recaudaron casi 70 eventos de financiación y más de 30 mil millones de yuanes.
En los últimos dos años, han surgido escenarios de entrega, limpieza y aterrizaje sin tripulación, y la fuerte entrada de capital ha empujado a los vehículos no tripulados a la "carril rápida" del desarrollo. Con el desarrollo de la tecnología de fusión de sensores multimodo, representantes pioneros se han incorporado al equipo "profesional", realizando diversas tareas como limpieza de carreteras, envíos postales y urgentes, entrega de envíos, etc.

Vehículos de limpieza no tripulados en funcionamiento.
Como “vehículo vocacional del futuro” que reemplaza a la mano de obra, las soluciones para evitar obstáculos aplicadas no deben ser descuidadas para ganar en la industria emergente, y el vehículo debe estar potenciado de acuerdo con el escenario de trabajo, como el vehículo no tripulado en la industria sanitaria. debería tener la función de identificación de stock; con la función de evitar obstáculos de forma segura en la industria del reparto; con la función de evitar riesgos de emergencia en la industria del almacenamiento……
- Industria sanitaria: una trinidad de sensores inteligentesquimio

Industria del saneamiento: se presenta la trinidad del sistema de detección inteligente
El robot "limpiador" Candela Sunshine de los Juegos Olímpicos de Invierno de Beijing utiliza una trinidad de esquemas de detección inteligente, equipados con 19 radares ultrasónicos, lo que permite al robot tener funciones integrales de evitación de obstáculos, prevención de desbordamiento y anti-dumping.
Aredondoevitación de obstáculos
La parte trasera está equipada con 2 radares ultrasónicos para monitoreo de marcha atrás y advertencia de obstáculos, 3 radares ultrasónicos debajo de la parte delantera y 6 radares ultrasónicos en los lados para funciones de avance horizontal, vertical y oblicuo y evitación de obstáculos.
Prevención de desbordamiento
Instale un sensor en la parte superior del área de carga del vehículo para realizar la función de monitoreo de la situación de carga y garantizar que la capacidad de carga cumpla con los estándares de seguridad.
Antidumping
Evita que la sección dividida vuelque debido a fuerzas externas en estado sin carga o con carga insuficiente, poniendo en peligro la seguridad pública.
- Industria de entrega:integralevitación inteligente de obstáculos squimio
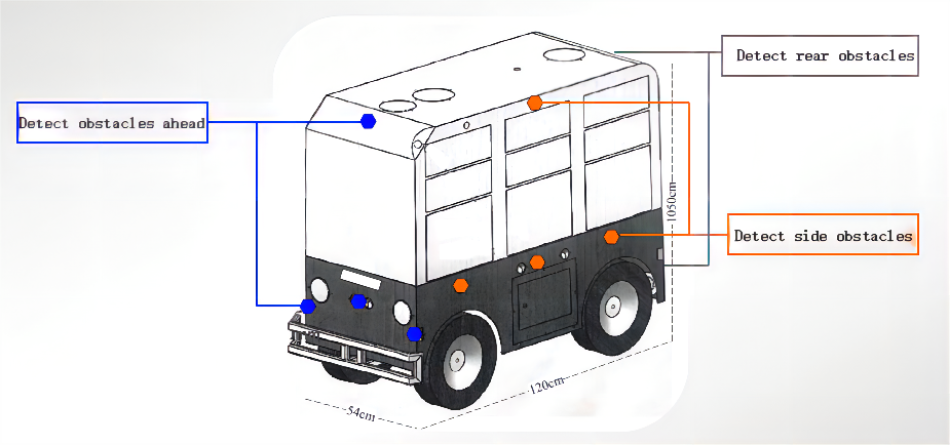
Industria de entregas: demostración parcial de un esquema integral inteligente para evitar obstáculos
En comparación con la logística de larga distancia, el núcleo del escenario de la industria de entrega radica en las cortas distancias y la alta frecuencia, lo que significa que los vehículos de entrega no tripulados deben diseñarse para ser más flexibles y seguros para hacer frente a escenarios urbanos complejos, como el transporte de edificios. y evitación de obstáculos en los callejones. DYP ha proporcionado un plan integral inteligente para evitar obstáculos a Zhixing Technology, convirtiendo su producto en un vehículo de reparto no tripulado que se probará en un entorno semiabierto en China.
Evitación de obstáculos delanteros y traseros.
Se instala un radar ultrasónico en la parte superior de la parte delantera y trasera para detectar obstáculos más altos, como postes de restricción de altura; Tres radares ultrasónicos están instalados en la parte inferior de la parte delantera y trasera para detectar obstáculos laterales bajos y delanteros, como postes de restricción. Al mismo tiempo, los radares ultrasónicos en la parte delantera y trasera pueden asegurar el vehículo no tripulado al dar marcha atrás o girar.
Evitación de obstáculos laterales
Se instala un radar ultrasónico encima de cada lado para detectar obstáculos laterales altos y ayudar a activar la función de entrega urgente; Se instalan tres radares ultrasónicos debajo de cada lado para detectar obstáculos en el lado bajo, como bordes de carreteras, cinturones verdes y postes verticales. Además, los radares ultrasónicos de los lados izquierdo y derecho pueden encontrar el "espacio de estacionamiento" adecuado para el vehículo no tripulado y completar el estacionamiento automático con éxito.
- Industria del almacenamiento: prevención de emergencias y optimización de rutaszación squimio

Diagrama de evitación de obstáculos AGV
Los vehículos no tripulados de almacén comunes se colocan para la planificación de rutas locales a través de soluciones de tecnología láser e infrarroja, pero ambos se ven afectados por la luz en términos de precisión y pueden ocurrir riesgos de colisión cuando varios carros se cruzan en un almacén. Dianyingpu proporciona soluciones de optimización de rutas y prevención de riesgos de emergencia para la industria del almacenamiento que no se ven afectadas por la luz, utilizando un radar ultrasónico para ayudar a los AGV de almacén a lograr la evitación autónoma de obstáculos en los almacenes y un estacionamiento oportuno y preciso en tiempos de crisis para evitar colisiones.
Emergenciaevitación
Cuando el radar ultrasónico detecta que un obstáculo ingresa al área de advertencia, el sensor enviará la información de orientación del obstáculo más cercano al carro no tripulado al sistema de control AGV a tiempo, y el sistema de control controlará el carro para reducir la velocidad y frenar. Para aquellos obstáculos que no se encuentren en la zona delantera del carro, aunque estén cerca, el radar no avisará para garantizar la eficiencia del funcionamiento del carro.
Ruta óptimazación
El vehículo no tripulado utiliza la nube de puntos láser combinada con el mapa de alta precisión para planificar rutas locales y obtener una serie de trayectorias para seleccionar. Luego, la información de obstáculos obtenida por ultrasonido se proyecta y se vuelve a calcular en el sistema de coordenadas del vehículo, las trayectorias obtenidas a seleccionar se filtran y corrigen aún más, finalmente se deriva la trayectoria óptima y el movimiento hacia adelante se basa en esta trayectoria.

- Capacidad de alcance de hasta 5 m,punto ciego tan bajo como 3 cm
- Estable, no afectado por la luz ycolor de lo medido objeto
- Alta confiabilidad, conocer elrequisitos de clase de vehículo
Hora de publicación: 30-ago-2022